UAVs Description
Our ecosystem comprises:
- A flight stack for multi-rotor UAVs [GitHub]
- A flight stack for fixed-wing UAVs [GitHub]
- A suite of Matlab® codes to plot logged flight data [GitHub]
- Doxygen documentation of multi-rotor UAV flight stack
- Doxygen documentation of winged UAV flight stack
- A PyChrono-based high-fidelity simulator for UAVs [GitHub]
Multi-Rotor UAV Flight Stack

The Advanced Control Systems Lab (ACSL) Flight Stack is a PX4-compatible offboard flight stack designed for multi-rotor UAVs. This open-source, freeware software serves as a shared platform for the UAV control community, enabling easier comparison and evaluation of research outcomes.
This flight stack is tailored for autonomous UAVs featuring collinear propellers, such as quadcopters, X8-copters, and hexacopters. It currently supports both quadcopters and X8-copters. With adjustments, the software can be adapted to other UAV configurations that utilize similar propeller arrangements.
Winged UAV Flight Stack
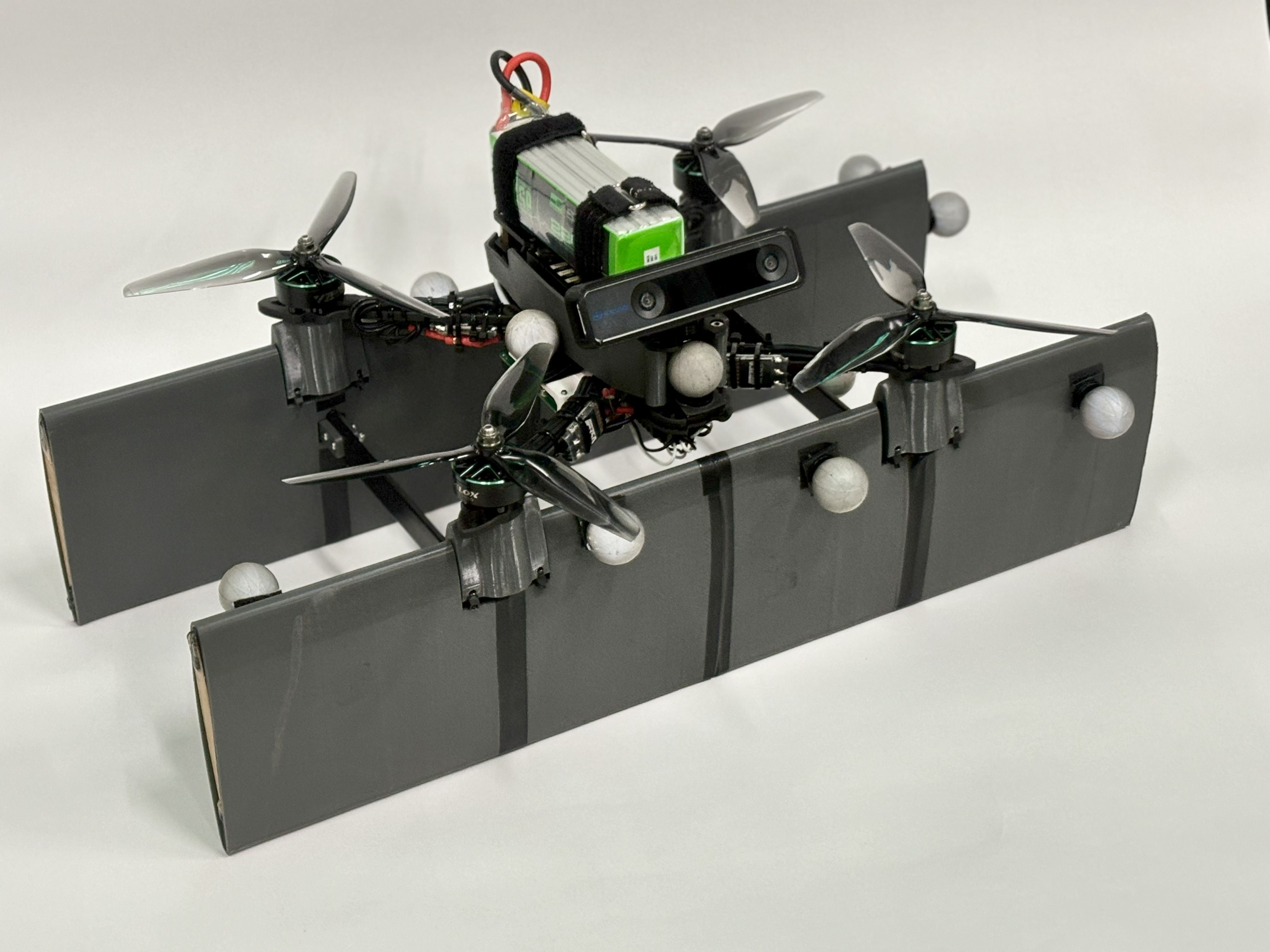
The Advanced Control Systems Lab (ACSL) Flight Stack - Winged is a PX4-compatible offboard software designed for multi-rotor winged UAVs. This software aims to provide the UAV control community with an open-source, freeware solution that acts as a common platform, enabling easier comparison of research outcomes.
At the moment, this code is designed for quad-biplanes (QRBPs), which are quadcopters with two parallel wings. This architecture currently supports up to 8 motors and, in the future, will be improved to support additional classes of fixed-wing aircraft.